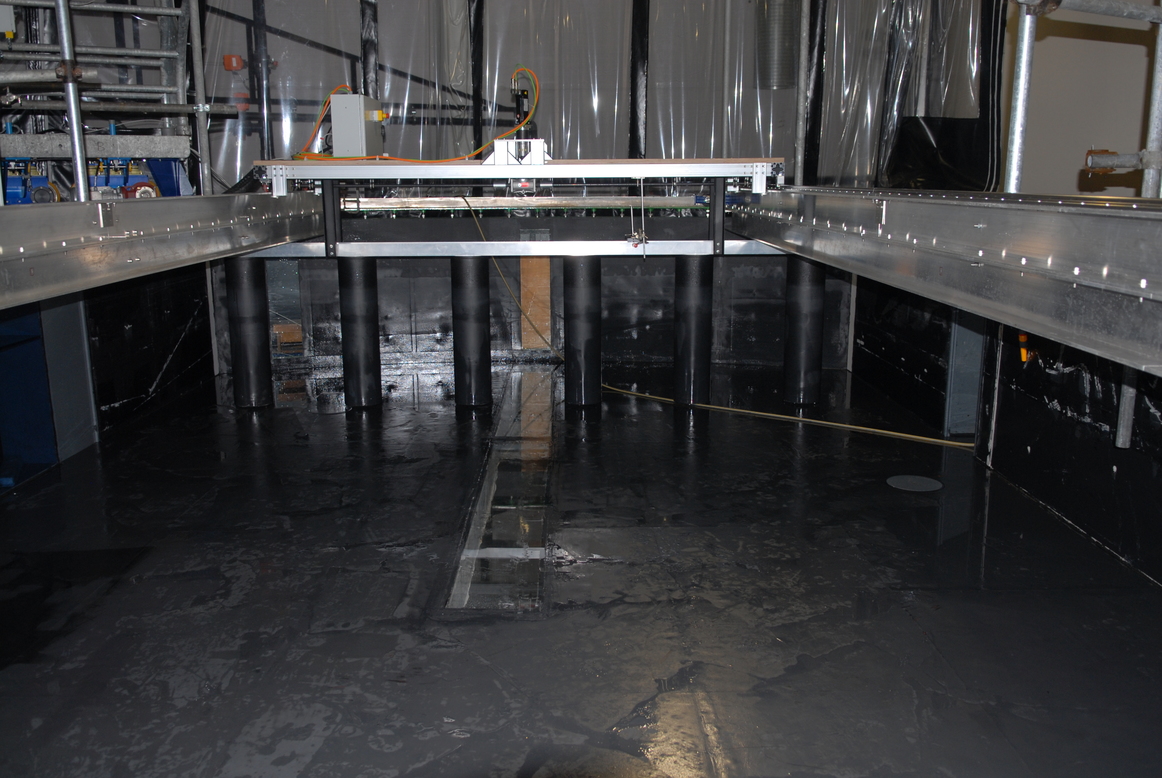
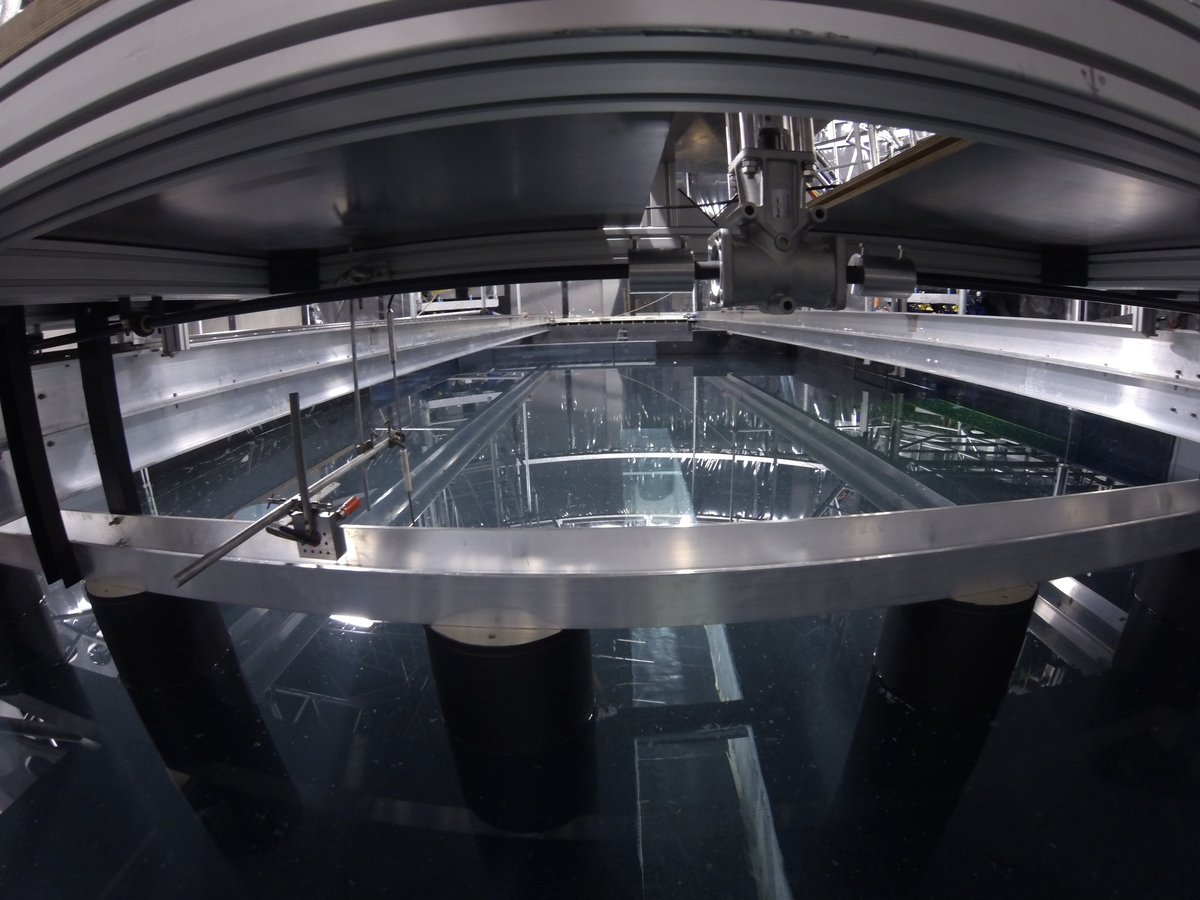
We built a new 4-m-wide carriage in the Coriolis platform. It is self propelled and can move along its 13-m-long tracks.
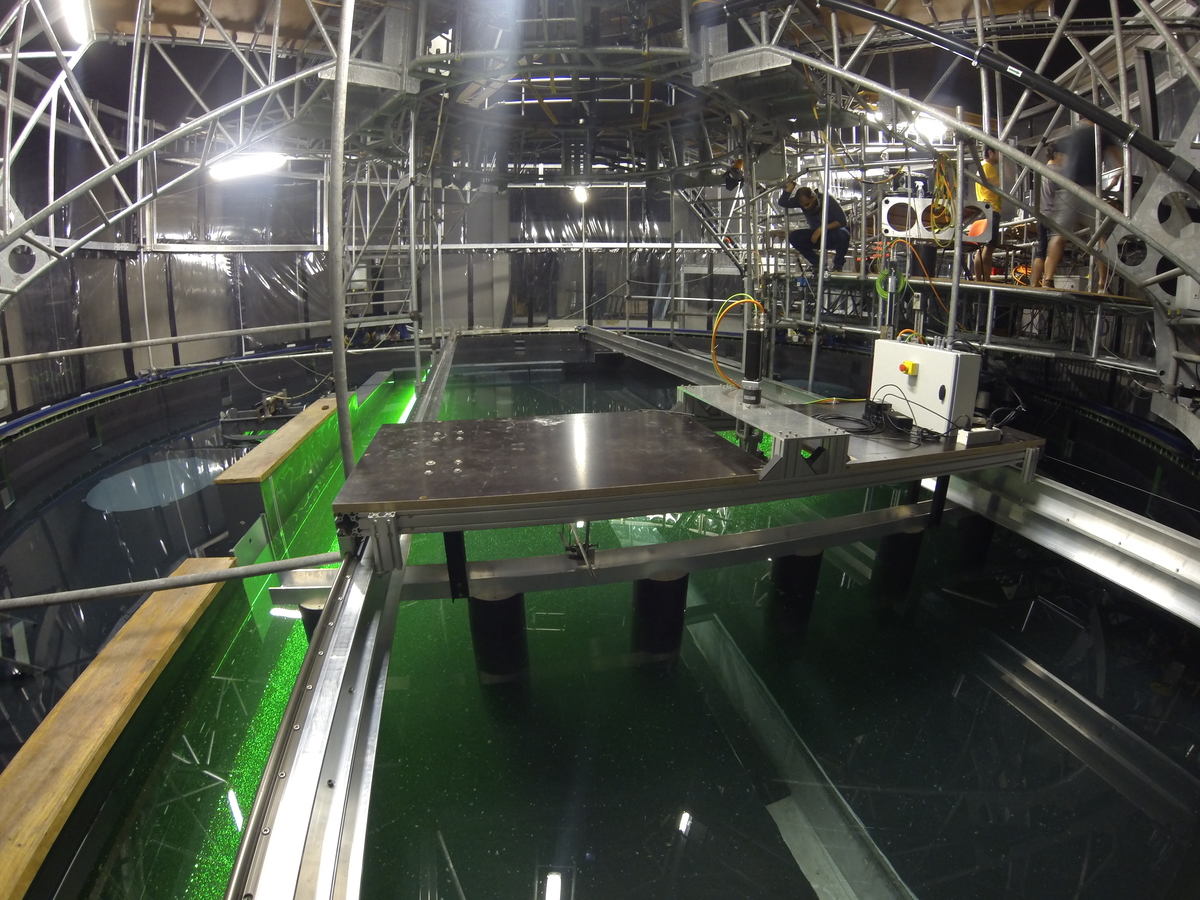
There was also a carriage in the old Coriolis platform but it was not kept because it was not very satisfactory. We decided to build a new carriage for the Milestone project (financed by Euhit). Such carriage is a particular piece. We need to control its movement quite precisely and it has to be very soft and regular, without vibration. The carriage has to laid on very smooth, flat and horizontal tracks of 13 m but such carriage can not be very light. Therefore, designing and building such big object is difficult.
We decided that we do most of the work internally at LEGI, with technicians and researchers of the lab so we control everything and learn. It was an impressive work and I would like to thank a lot Julie Germinario, Samuel Viboud, Thomas Valran, Mile Kusulja, Joseph Virone, Vincent Govart, Stéphane Pioz-Marchand, Tristan Vandenberghe, Nicolas Mordant, Joel Sommeria, Antoine Campagne and Rémi Chassagne. You can see the result in these photographies.
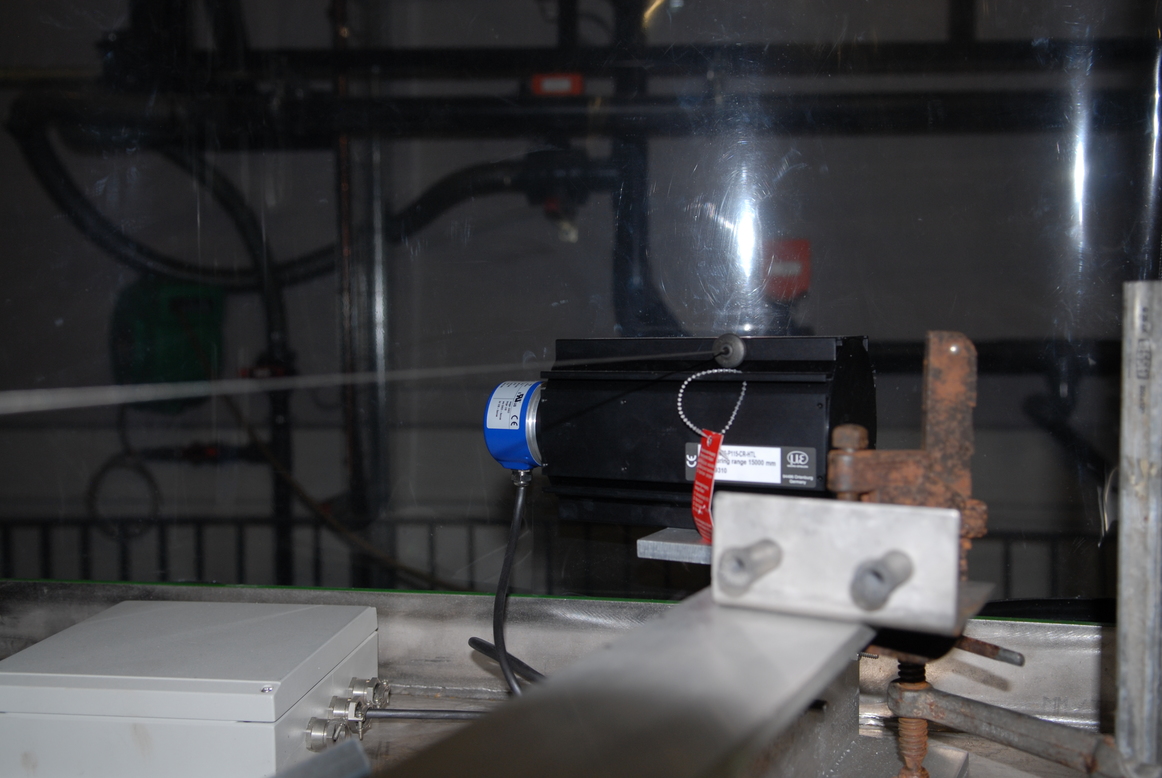
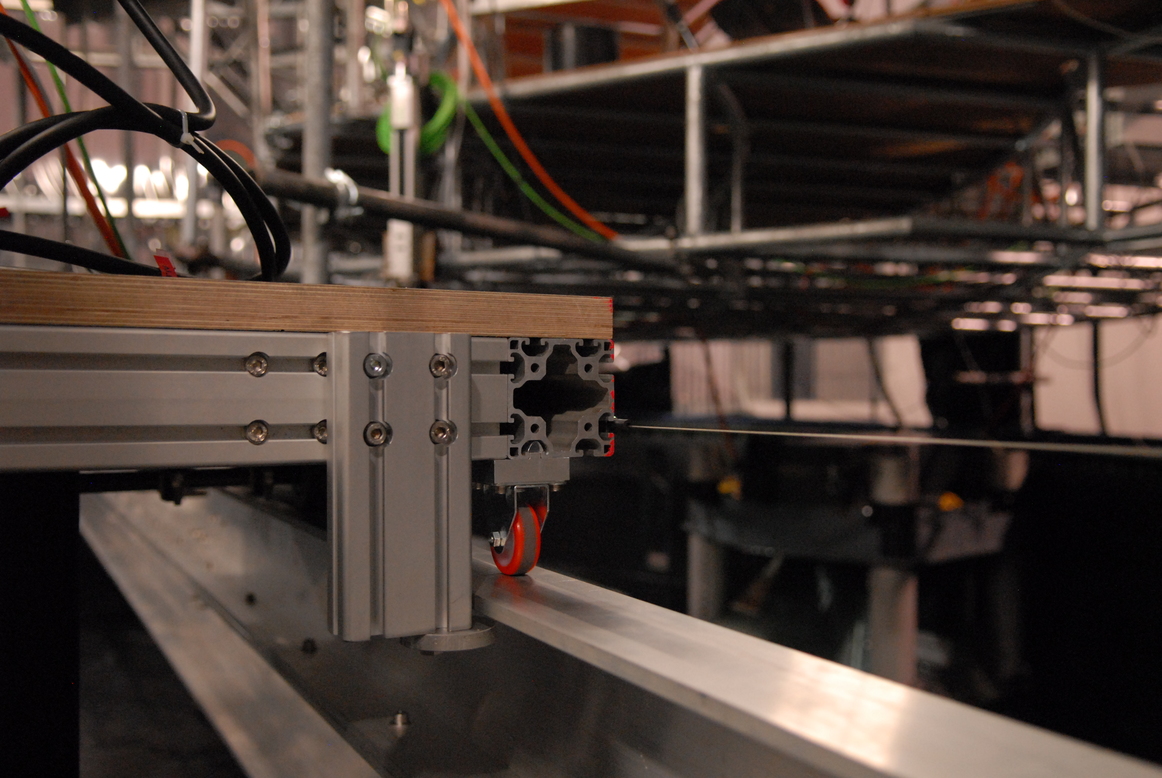
Below, you can see a position sensor by cable, which gives the position of the carriage with an accuracy of approximately 1 mm over 13 m!
We spent approximately 17 k€ in total, including 9 k€ for the tracks and 2 k€ for the motor.
We decided to control the carriage with an open-source software that we developed ourselves. We control the motor (Unidrive SP, Leroy Somer) by Modbus TCP and a position sensor (Micro-epsilon) which sends quadrature signals read with a Labjack acquisition card.
We didn't use the close-source commercial program Labview and we develop everything with Python. Our code is available and open-source (see the repositories fluidlab and fluidcoriolis).
Since we need to have a software easily usable by people coming from outside LEGI to work with the Coriolis platform, we develop a nice graphical user interface (GUI) with the Qt framework (Q designer and PyQt/Pyside).
Do not hesitate to contact me if you would like to do something similar with Python and fluidlab.